医疗康复领域
高精度肌电义肢手
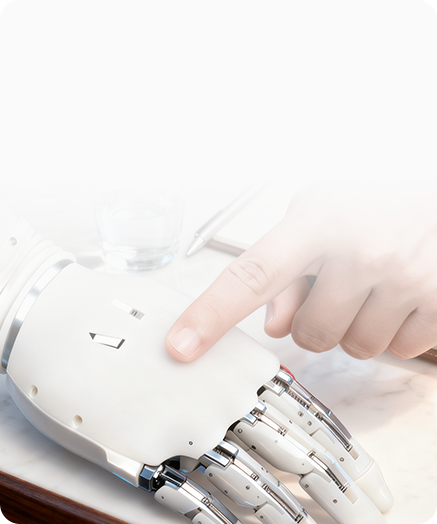
通过微电流信号捕捉与神经接口技术,帮助上肢残障患者恢复自然抓握、触觉反馈等基础功能。

九章注专注生物机电融合与人工智能创新,致力于通过高精度肌电义肢手与智能灵巧手系统,为残障群体重建肢体功能,同时推动智能仿生技术在工业与服务机器人领域的突破。
技术革新方面,自研多模态生物信号采集系统结合深度学习算法,实现微电流信号的精准捕捉与毫秒级响应。触觉反馈与自适应抓握技术让握杯、取物等日常动作回归自然,使科技真正融入生活细节。
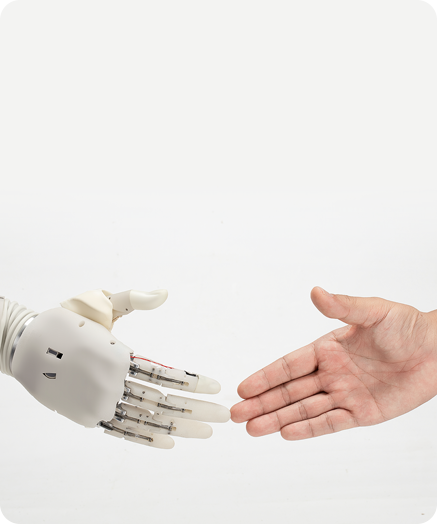
从医疗康复到智能制造,持续突破神经接口与柔性传感技术边界,构建人与世界的新型交互范式--在这里,肢体的缺失将不再是限制,而是生命潜能再生的起点。
通过微电流信号捕捉与神经接口技术,帮助上肢残障患者恢复自然抓握、触觉反馈等基础功能。
结合生物信号采集与自适应算法,提供个性化肢体功能训练方案。
应用于工业自动化场景,实现精密抓取、柔性操作;服务机器人场景中支持复杂交互任务。
为合作伙伴提供柔性传感、触觉反馈等核心技术组件。
高精度肌电义肢手
神经接口系统
仿生技术模块化输出
智能灵巧手系统

以自研多模态生物信号采集系统为核心,结合深度学习算法形成软硬件闭环。

针对医疗康复需求提供定制化义肢产品,面向工业客户提供模块化智能抓取系统。


与医疗机构、机器人企业、科研机构合作,推动技术从实验室到市场的快速落地。
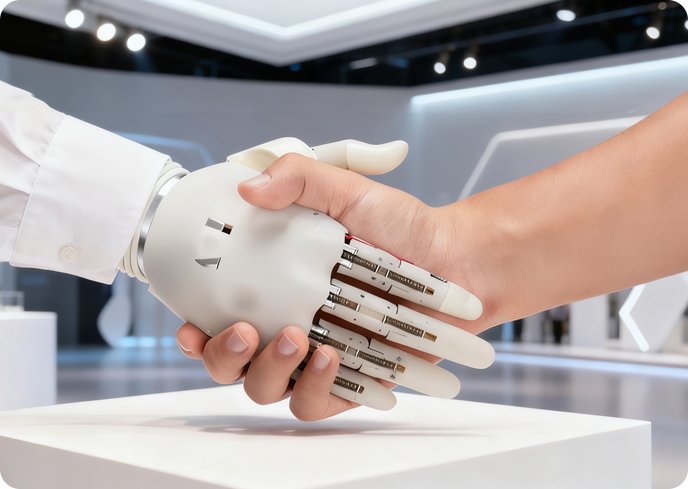
以“肢体功能重建”为原点,通过技术弥合残障群体与正常生活的鸿沟。
追求仿生技术的“无感化”,让机械动作无限接近人类肢体的灵活与直觉。
微电流信号捕捉技术:突破传统肌电义肢的精度限制,通过自研高灵敏度传感器与抗干扰算法,实现微伏级生物电信号的毫秒级解析,精准还原用户意图(如抓握力度、手势切换)。
医疗级技术反哺工业场景:将医疗康复中积累的高精度生物信号处理能力,转化为工业机器人所需的柔性抓取、自适应操控技术(如易碎品分拣、精密装配),解决传统机械臂刚性过强、灵活性不足的痛点。
工业场景验证技术可靠性:在复杂工业环境中打磨系统的稳定性和抗干扰性,反向优化医疗产品的耐用性与响应速度,形成技术迭代的“飞轮效应”。
从“功能替代”到“能力增强”:不仅帮助残障群体恢复基础生活能力,更通过智能义肢手拓展人类操作极限,重新定义人与工具的共生关系。
自然交互的极致追求:通过柔性传感与自适应算法,实现机械系统对人类动作意图的“无感理解”——无需刻意学习操控,动作如真实肢体般直觉化(如握杯时自动调节力度防滑)。
核心模块标准化输出:将生物信号解析、触觉反馈等核心技术封装为独立模块,向医疗设备商、机器人企业提供“即插即用”解决方案,降低行业仿生技术应用门槛。
刚性需求锚定医疗基本盘:全球超1亿上肢残障人群的康复需求,确保技术应用的长期社会价值与市场空间。
前沿技术卡位未来场景:在脑机接口、柔性电子皮肤等方向提前布局,占据人机融合时代的“交互入口”,为元宇宙、具身智能等新兴领域储备关键技术。

地址: 北京市海淀区丰慧中路7号新材料创业大厦4层413室
TEL: 400 999 6027






